MO417 - Ata da Aula [Programação Dinâmica]
Ata: Aula do dia 02/04/2003
Assunto: Capítulo 15 (Tópicos 15.1 e 15.2)
Professor: João Meidanis
Redator: Thiago Alves da Silva
A figura sobre linha de montagem foi obtida do site
http://www.introductiontoalgorithms.com
e é reproduzida aqui seguindo as normas vigentes de copyright
(
http://www.mcgraw-hill.com/copyrttm.htm ).
Tópicos
1. Introdução
2. Programação de linha de montagem
2.1. A estrutura de uma solução ótima
2.2. Uma solução recursiva
2.3. Cálculo do valor de uma solução
ótima
2.4. Construção de uma solução
ótima
3. Multiplicação de cadeias de matrizes
3.1. A estrutura de uma solução ótima
3.2. Uma solução recursiva
3.3. Cálculo do valor de uma solução
ótima
3.4. Construção de uma solução
ótima
4. Conclusão
5. Referências Bibliográficas
1. Introdução
A programação dinâmica é uma importante técnica
para o projeto e análise eficiente de algoritmos. Como o método
de dividir e conquistar, ela resolve problemas combinando as soluções
para subproblemas. Ela é aplicável quando os subproblemas
não são independentes, isto é, quando os subproblemas
compartilham subsubproblemas. Um algoritmo de programação
dinâmica resolve cada subproblema uma vez só e então
grava sua resposta em uma tabela, evitando assim o trabalho de recalcular
a resposta toda vez que o subsubproblema é encontrado. Esse método
pode às vezes transformar facilmente algoritmos de tempo exponencial
em algoritmos de tempo polinomial.
O desenvolvimento de um algoritmo de programação dinâmica
pode ser desmembrado em uma seqüência de 4 tapas:
1. Caracterizar a estrutura de uma solução ótima
2. Definir recursivamente o valor de uma solução ótima
3. Calcular o valor de uma solução ótima
4. Construir uma solução ótima a partir de informações
calculadas
Veremos a seguir dois exemplos onde a programação dinâmica
é empregada com sucesso.
2. Programação de linha de montagem
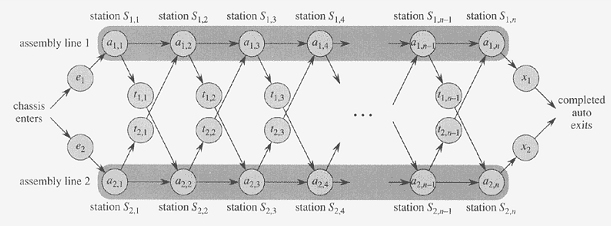
Nesse primeiro exemplo temos uma fábrica com duas linhas de montagens.
Um chassi de automóvel entra em cada linha de montagem, tem as peças
adicionadas a ele em uma série de estações, e um automóvel
pronto sai no final da linha. Cada linha de montagem possui n estações,
numeradas com j = 1, 2, ..., n. Cada linha de montagem é
numerada com i = 1 ou 2. Com isso temos S_i,j como sendo a j-ésima
estação na linha i. A j-ésima estação
da linha 1 (S_1,j) executa a mesma função que a j-ésima
estação na linha 2 (S_2,j). Porém, as estações
foram construídas em épocas diferentes e com tecnologias
diferentes, de forma que o tempo exigido em cada estação
varia, até mesmo as estações na mesma posição
nas duas linhas. Denotamos o tempo de montagem exigido na estação
S_i,j por a_i,j. Além disso, temos um tempo de entrada e_i, um tempo
de saída x_i e um tempo para transferir um chassi de uma linha de
montagem para outra depois da passagem pela estação S_i,j,
que é t_i,j. É importante ressaltar que uma transferência
pode ocorrer até quando a estação for n-1, pois após
a n-ésima estação, a montagem se completa.
Visto isso, podemos definir o problema que será resolvido pela
programação dinâmica, que é determinar que estações
escolher na linha 1 e quais escolher na linha 2 para minimizar o tempo
total de passagem de um único automóvel pela fábrica.
Caso fossemos determinar o caminho mais rápido pela fábrica
enumerando todos os modos possíveis e calculando quanto tempo cada
um deles demora, levaríamos o tempo de Ômega(2^n), que é
inviável quando n é grande.
Dicas do Professor:
O professor chama a atenção para a definição
do custo, que nesse caso é apenas o tempo.
Analisando a representação gráfica da linha de
montagem, o professor alerta para que nos preocupemos com as entradas:
"e's", "a's", "t's" e os "x's", pois é o que o programa receberá.
2.1. A estrutura de uma solução ótima
Esta é a primeira etapa do paradigma da programação
dinâmica, caracterizar a estrutura de uma solução ótima.
No caso da programação da linha de montagem, uma solução
ótima para um problema (encontrar o caminho mais rápido passando
pela estação S_i,j) contém em seu interior uma solução
ótima para subproblemas (encontrar a passagem mais rápida
por S_1,j-1 ou S_2,j-1). Essa é a propriedade da subestrutura ótima.
Concluindo, temos que para resolver o problema de encontrar o caminho
mais rápido através da estação j de
uma das linhas, resolvemos os subproblemas de encontrar os caminhos mais
rápidos pela estação j -1 em ambas as
linhas. Isso permite
que você construa a solução pouco a pouco.
O professor completa essa análise dizendo que a propriedade da
subestrutura ótima verifica-se neste caso da seguinte forma: um
prefixo B de uma solução
ótima A também é uma solução
ótima para o subproblema correspondente,
porque se ela não fosse, existiria outra melhor que poderia
substituí-la, melhorando também a solução A. Para
o problema em questão, podem existir várias
soluções
com o mesmo tempo, ou
seja, a ótima não é necessariamente única.
2.2. Uma solução recursiva
Nessa etapa buscamos uma solução recursiva para o problema
em questão.
De acordo com nosso problema, temos que o caminho mais rápido
até completar a estação S_1,j é o caminho mais rápido
até completar a estação S_1,j-1, e depois passar
diretamente pela a estação
S_1,j, ou o caminho mais rápido até completar a estação S_2,j-1,
uma transferência da linha 2 para a linha 1, e depois passar pela estação
S_1,j (toma-se o que for menor dos dois). Um racioncínio análogo vale
para completar S_2,j. As recorrências a seguir mostram isso:
| e_1 + a_1,1
se j = 1,
f_1[j] = {
| min(f_1[j-1] + a_1,j , f_2[j-1] + t_2,j-1 + a_1,j)
se j >= 2. |
| e_2 + a_2,1
se j = 1,
f_2[j] = {
| min(f_2[j-1] + a_2,j , f_1[j-1] + t_1,j-1 + a_2,j)
se j >= 2. |
f_i[j] é o tempo mais rápido possível para levar um
chassi desde o ponto de partida até a estação S_i,j.
Por fim temos que o tempo mais rápido para levar um chassi por
todo o percursso na fábrica é:
| min(f_1[n] + x_1, f_2[n] + x_2). |
Discussão em aula:
-
Professor pergunta ao Fábio: Quantas chamadas recursivas
um algoritmo precisa realizar para resolver esse problema da linha de montagem?
-
Fábio: 2 chamadas recursivas.
-
Professor completa a resposta do Fábio: Sim, no máximo
duas, mas há um caso em que nenhuma chamada recursiva é feita:
o caso da primeira estação.
-
Professor chama Augusto para construir um algoritmo recursivo:
TEMPO(n)
Se (f_1(n) + x_1) < (f_2(n) + x_2)
tempominimo = f_1(n) + x_1
saidaporlinha = 1
Senao
tempominimo = f_2(n) + x_2
saidaporlinha = 2
Fim-se
f_i(n)
Se (n = 1)
devolver a_i(1) + e_i
Se f_i(n-1) + a_i(n) < f_î(n-1) + t_î(n-1) + a_i(n)
devolver f_i(n-1) + a_i(n)
Fim-se
devolver f_î(n-1) + t_î(n-1) + a_i(n) |
Obs.: A notação î, empregada no algoritmo, significa
que î valerá 1 se i for igual a 2 ou 2 se i for igual a 1.
-
Professor conclui: O problema dessa solução é
que ela gera muitas chamadas recursivas, inviabilizando seu uso.
2.3. Cálculo do valor de uma solução ótima
Um algoritmo recursivo para a solução deste problema gera
muitas chamadas recursivas, tendo como conseqüência disso, seu
tempo de execução exponencial em n. Agora, um algoritmo
utilizando a técnica de programação dinâmica,
consegue calcular o caminho mais rápido pela fábrica e o
tempo que ele demora, no tempo Theta(n).
FASTEST-WAY(a, t, e, x, n)
1 f_1[1] <- e_1 + a_1,1
2 f_2[1] <- e_2 + a_2,2
3 for j <- 2 to n
4 do if f_1[j-1]
+ a_1,j <= f_2[j-1] + t_2,j-1 + a1,j
5
then f_1[j] <- f_1[j-1] + a_1,j
6
l_1[j] <- 1
7
else f_1[j] <- f_2[j-1] + t_2,j-1 + a_1,j
8
l_2[j] <- 2
9 if
f_2[j-1] + a_2,j <= f_1[j-1] + t_1,j-1 + a_2,j
10
then f_2[j] <- f_2[j-1] + a_2,j
11
l_2[j] <- 2
12
else f_2[j] <- f_1[j-1] + t_1,j-1 + a2,j
13
l_2[j] <- 1
14 if f_1[n] + x_1 <= f_2[n] + x_2
15 then f* = f_1[n] + x_1
16
l* = 1
17 else f* = f_2[n] + x_2
18
l* = 2 |
O professor Meidanis conclui esse tópico chamando a atenção
para o uso de 4 vetores no lugar da recursão. Vetores esses: f_1,
f_2, l_1 e l_2.
2.4. Construção de uma solução ótima
A construção da solução ótima é
mostrada no procedimento PRINT-STATIONS, que imprime as estações
usadas, em ordem decrescente de número de estações.
PRINT-STATIONS(l,n)
1 i <- l*
2 imprimir "linha" i ",estação" n
3 for j <- n downto 2
4 do i <- l_i[j]
5 imprimir "linha" i ",estação"
j-1 |
O professor adverte sobre a saída desse procedimento, isto é,
ele imprime a ordem inversa, da última estação para
a primeira.
3. Multiplicação de cadeias de matrizes
Nesse caso não estamos realmente multiplicando matrizes. O objetivo
é apenas determinar uma ordem para multiplicar matrizes que minimize
o número de multiplicações escalares. O modo como
a cadeia de matrizes é colocada entre parênteses pode ter
um impacto dramático sobre o custo de avaliação do
produto.
Se fossemos utilizar um algoritmo de força bruta para verificar
exaustivamente todas as possíveis colocações entre
parênteses, obteríamos a seguinte recorrência:
| 1
se n = 1,
P(n) = {
|
n-1
| P (n) = soma P(k)P(n-k)
se n >= 2.
k=1 |
A solução para essa recorrência é Ômega(2^n).
Portanto, o número de soluções é exponencial
em n. Com isso verificamos que o método da força bruta
para se determinar a colocação ótima dos parênteses
é ineficiente.
Antes de iniciarmos nossa busca por uma solução eficiente
utilizando programação dinâmica, o professor chama
a atenção para a definição da entrada, que
nesse caso é um vetor de 0 até n, que contém
inteiros Pi. O vetor inicia de 0, pois a dimensão da matriz Ai é
Pi-1 * Pi. Também devemos nos preocupar em definir a saída,
nesse caso como sendo duas matrizes m e
s, onde somente a
diagonal principal será utilizada.
3.1. A estrutura de uma solução ótima
O primeiro passo é caracterizar a estrutura de uma solução
ótima. Vamos adotar a notação Ai..j para a matriz
que resulta da avaliação do produto Ai.Ai+1...Aj. Para obter
a solução do problema proposto, devemos obter A1..n, que
pode ser obtido pelo produto de A1..k.Ak+1..n, cujo custo ótimo
é obtido pela soma do custo de A1..k com Ak+1..n, mais o custo do
produto delas. A subcadeia A1..k deve ter parentização ótima,
do contrário poderíamos substituí-la, por outra com
o custo menor que o ótimo.
Logo, uma solução ótima para uma instância
do problema contém soluções ótimas para as
sub-instâncias do mesmo problema, o que permite o emprego da programação
dinâmica.
3.2. Uma solução recursiva
Deve-se definir uma expressão recursiva para a solução
ótima em função das sub-instâncias. Será
utilizada uma tabela m_ij 1 <= i <= j <= n, para armazenar a solução
ótima para Ai..j. O valor m[i,i] = 0, pois Ai..i = Ai, não
havendo a necessidade de qualquer cálculo.
Para i < j, podemos usar a estrutura ótima delineada na etapa
1. Assim Ai..j pode ser dividido em duas partes Ai..k e Ak+1..j, onde i
<= k < j. Então m[i,j] é igual ao menor custo para
calcular Ai..k e Ak+1..j, mais o custo para multiplicar essas duas matrizes.
O custo para multiplicar Ai..k.Ak+1..j exige Pi-1.Pk.Pj multiplicações
escalares.
Temos a seguinte definição recursiva para o custo mínimo
de colocar entre parênteses o produto AiAi+1...Aj:
| 0
se i = j,
m[i,j] = {
| min{m[i,k] + m[k+1,j] + Pi-1.Pk.Pj} se i <
j.
| i <= k < j |
Os valores de m[i,j] fornecem os custos de soluções ótimas
para subproblemas, mas não informações para a construção
de uma solução ótima. Para facilitar a indicação
de uma parentização ótima, basta armazenar na matriz
s[i,j] o valor de k usado para o valor ótimo de m[i,j], ou seja
m[i,j] = m[i,k] + m[k+1,j] + Pi-1.Pk.Pj.
3.3. Cálculo do valor de uma solução ótima
Usando a programação dinâmica passamos a ter Theta(n^2)
subproblemas (basta observar que m[i,j] armazena os valores ótimos
desses subproblemas), bem mais eficiente que o algoritmo de força
bruta que é exponencial em n.
Neste ponto deve-se elaborar um algoritmo para a solução
do problema, fazendo os cálculos de tal forma que nenhuma solução
seja requisitada antes que a mesma já tenha sido calculada. O procedimento
a seguir utiliza uma tabela auxiliar m[1..n,1..n] para armazenar os custos
de m[i,j] e uma tabela auxiliar s[1..n,1..n] que registra qual índice
de k alcançou o custo ótimo no cálculo de m[i,j].
Na construção de uma solução ótima usaremos
a tabela s.
MATRIX-CHAIN-ORDER(P)
1 n <- comprimento[P] -1
2 for i <- 1 to n
3 do m[i,j] <-
0
4 for l <- 2 to n
// l é o comprimento da cadeia
5 do for i <- 1
to
n - l + 1
6 do
j
<- i + l - 1
7
m[i,j] <- infinito
8
for k <- i to j - 1
9
do q <- m[i,k] + m[k+1,j] + Pi-1.Pk.Pj
10
if q < m[i,j]
11
then m[i,j] <- q
12
s[i,j] <- k
13 return m e s |
O tempo de execução do procedimento, O(n^3), pode ser determinado
simplesmente observando a estrutura de loop aninhados.
3.4. Construção de uma solução ótima
A construção de uma solução ótima para
o problema de multiplicação de cadeias de matrizes se baseia
na tabela s. Cada entrada s[i,j] registra o valor de k tal que a
colocação ótima de parênteses de AiAi+1..Aj
divide o produto entre Ak e Ak+1. Desse modo, sabemos que a multiplicação
de matrizes final no cálculo ótimo de A1..n, é A1..s[1,n]As[1,n]+1..n.
As multiplicações de matrizes anteriores podem ser calculadas
recursivamente, pois s[1,s[1,n]] determina a última multiplicação
de matrizes no cálculo de A1..s[1,n], e s[s[1,n]+1,n] determina
a última multiplicação de matrizes no cálculo
de As[1,n]+1..n. O procedimento recursivo PRINT-OPTIMAL-PARENS mostra isso.
PRINT-OPTIMAL-PARENS(s,i,j)
1 if i = j
2 then print "A"i
3 else print "("
4
PRINT-OPTIMAL-PARENS(s,i,s[i,j])
5
PRINT-OPTIMAL-PARENS(s,s[i,j]+1,j)
6
print ")" |
A chamada inicial deve ser PRINT-OPTIMAL-PARENS(s,1,n), onde n é
o número de matrizes.
Discussão em aula:
-
Alexandro: o exemplo de multiplicação de matrizes
não é tão intuitivo quanto o da linha de montagem;
-
Professor: a diferença é que na linha de montagem
você utiliza uma estrutura linear para armazenar os cálculos
e aqui você precisa de uma estrutura quadrática para o armazenamento.
O armazenamento de informações (guardar resultados anteriores
ao invés de recalcular, como durante chamadas recursivas) é
a principal característica da programação dinâmica.
Isso tudo acaba impactando na performance do algoritmo, pois o outro utiliza
estrutura linear e o algoritmo é linear. Esse usa uma estrutura
quadrática e a complexidade é n^3, isto é, ele é
cubo por dois motivos: um porque a estrutura cresceu de linear para quadrática,
e outro porque para preencher uma célula você precisa observar
n
outras. No caso da linha de montagem para preencher uma célula você
precisa observar outras 2, ou seja, uma constante.
4. Conclusão
O professor Meidanis conclui destacando as características da programação
dinâmica: o problema precisa ter a propriedade da subestrutura ótima;
então começamos com uma solução recursiva,
mas ela será inviável; com isso, a transformamos em uma solução
interativa, que irá ter tempo polinomial, com a característica
de calcular primeiro o valor de uma solução ótima
e só depois construir a solução.
Mesmo sendo considerado um assunto complexo para alguns alunos, o professor
deixa claro que outros problemas serão estudados a fim de fortalecermos
a idéia da programação dinâmica, e assim assimilarmos
melhor o conteúdo desse capítulo.
5. Referências bibliográficas
-
Cormen, T., Leiserson, C., Rivest, R., Stein, C. Algoritmos (Teoria e Prática)
- Tradução da 2a edição Americana. 2002;
-